服务热线
400-9655-321
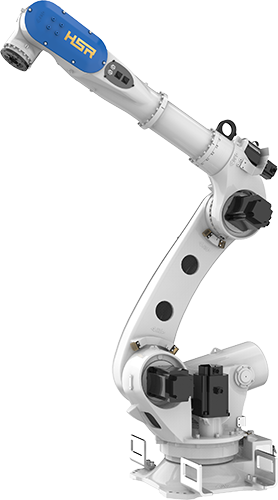
HSR-JR6210L机器人整个系统结构紧凑,本体采用全齿轮刚性传动,重复定位精度高,故障率低,操作简单,采用总线结构,扩展应用方便,能够在搬运、码垛、点焊、打磨等多个场合进行应用。
| 工业机器人 | HSR-JR6210L | |
|---|---|---|
| 自由度 | 6 | |
| 额定负载 | 210Kg | |
| 最大工作半径 | 3100mm | |
| 重复定位精度 | ±0.05mm | |
| 运动范围 | J1 | ±180° |
| J2 | -13°/-152° | |
| J3 | +6°/+248° | |
| J4 | ±180° | |
| J5 | ±120° | |
| J6 | ±360° | |
| 最高速度 | J1 | 125°/s,2.18rad/s |
| J2 | 115°/s,2.01rad/s | |
| J3 | 115°/s,2.01rad/s | |
| J4 | 155°/s,2.71rad/s | |
| J5 | 160°/s,2.79rad/s | |
| J6 | 220°/s,3.84rad/s | |
| 容许惯性矩 | J6 | 137.78kg㎡ |
| J5 | 190.15kg㎡ | |
| J4 | 190.15kg㎡ | |
| 容许最大静态负荷扭矩 | J6 | 735Nm |
| J5 | 1365Nm | |
| J4 | 1365Nm | |
| 适用环境 | 温度 | 0~45° |
| 湿度 | 20%~80% | |
| 其他 | 避免与易燃易爆或腐蚀性气体、液体接触,远离电子噪声源(等离子) | |
| 示教器线缆长度 | 8米 | |
| 本体-柜体连接线长度 | 8米 | |
| I/O参数 | 数字量:31位输入(NPN),29位输出(NPN) | |
| 本体预留信号线 | 42位(航空插头接线方式:焊接) | |
| 预留气路 | 2*Φ12 | |
| 电源容量 | 18.5KVA | |
| 额定功率 | 15KW | |
| 额定电压 | 3相AC380V | |
| 额定电流 | 25A | |
| 本体防护等级 | IP54 | |
| 安装方式 | 地面 | |
| 本体重量 | 1170kg | |
| 控制柜防护等级 | IP54 | |
| 控制柜重量 | 150kg | |

PRODUCT RECOMMENDATION
HOT NEWS
售前热线:400-9655-321
重庆公司:400-6007-826
![[V1.6.10]华数机器人操作与编程说明书v0.2.2.zip](./db_picture/pro5/202012161102525900.jpg)