服务热线
400-9655-321

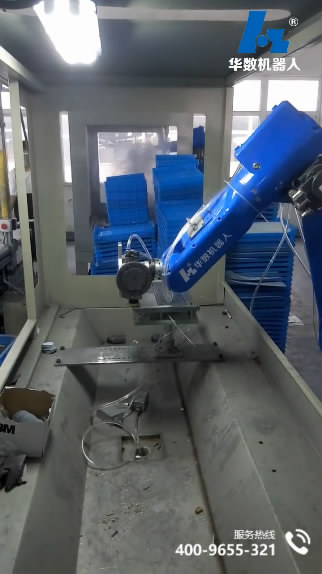
为解决目前3C打磨行业中通用机器人难以适应打磨过程反复冲击载荷大、作业环境粉尘大(干打)、湿度高(水打)的问题,为给客户创造持续稳定的生产能力,华数HSR-JR612-1600/DM应运而生,该机型针对打磨工艺进行特定优化,带来完美的3C打磨解决方案。
特点
强悍的本体性能
1、高防护:针对打磨时粉尘和液体飞溅问题,机器人小臂及手腕防护等级达到IP67,防止侵入物对机器人本体的损伤。
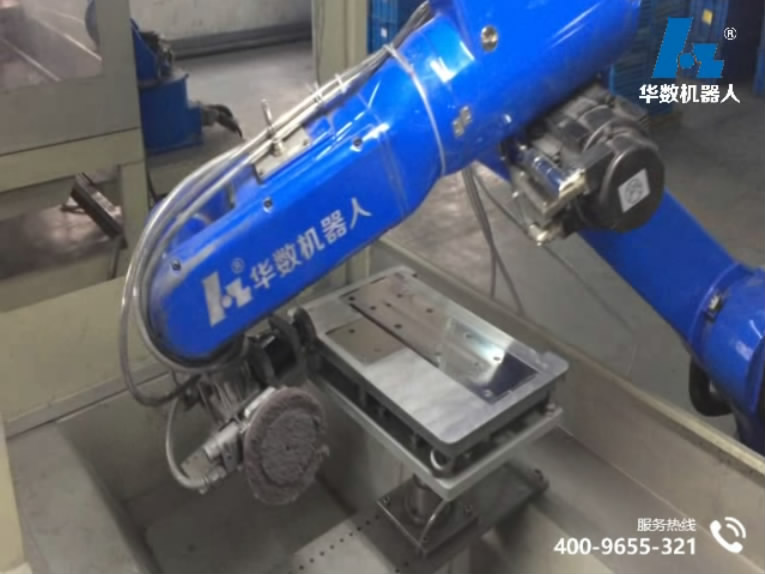
2、加强的载荷设计:为了应对打磨过程中打磨力对机器人的反复冲击,增强设计机器人受到冲击较大的关键部位,保证使用寿命。
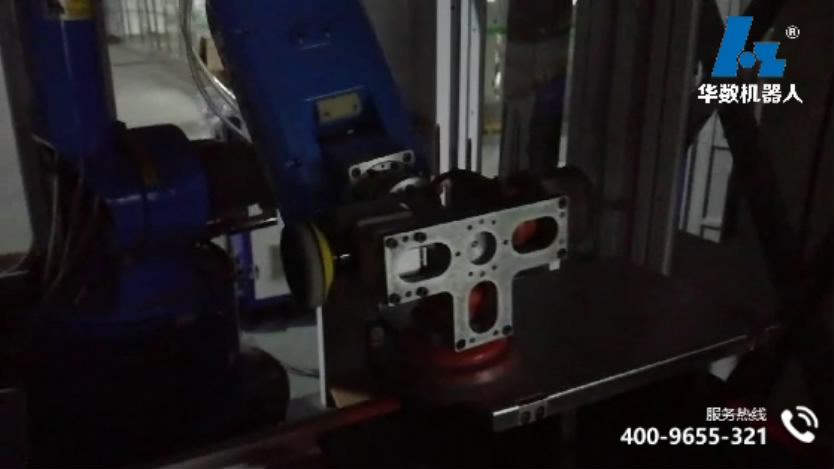
3、高刚度:增强设计的小臂提供了足够的刚度以应对打磨冲击,保证在打磨过程中轨迹的准确性及打磨精度保持性,提供持续长久的高质量打磨。
4、高精度:绝对定位精度达到±0.4mm,重复定位精度±0.06mm,减小离线编程与实际打磨轨迹间的误差,缩短生产调试周期,降低调试难度。
5、充分的空间利用:针对3C打磨工件的尺寸及工艺要求,优化机器人臂展,使机器人在满足绝大多数工件打磨的要求下减少占地面积,提升空间使用率,提高布置密度。
打磨专用离线编程软件
重庆华数机器人自行研发的打磨离线编程软件,具有“快速编程、精准实现”的特点,集成专业应用工艺,易于快速上手,结合配套精度补偿系统精准实现运行轨迹。降低轨迹编程难度,缩短生产调试周期。
友好易用的从操作系统
华中数控自主研发控制系统拥有业内较强的易使用性,通过高速传输EtherCAT总线进行数据通讯,完成多轴联动圆弧插补运动。操作友好,易于理解。
| 工业机器人 | HSR-JR612-1600/DM | |
|---|---|---|
| 自由度 | 6 | |
| 额定负载 | 12Kg | |
| 最大工作半径 | 1555mm | |
| 重复定位精度 | ±0.06mm | |
| 运动范围 | J1 | ±168° |
| J2 | -170°/+75° | |
| J3 | +40°/ +265° | |
| J4 | ±180° | |
| J5 | ±118° | |
| J6 | ±360° | |
| 最高速度 | J1 | 197°/s,3.44rad/s |
| J2 | 197°/s,3.44rad/s | |
| J3 | 197°/s,3.44rad/s | |
| J4 | 600°/s,10.47rad/s | |
| J5 | 375°/s,6.54rad/s | |
| J6 | 375°/s,6.54rad/s | |
| 容许惯性矩 | J6 | 0.17kg㎡ |
| J5 | 1.2kg㎡ | |
| J4 | 1.2kg㎡ | |
| 容许扭矩 | J6 | 15 Nm |
| J5 | 35 Nm | |
| J4 | 35 Nm | |
| 适用环境 | 温度 | 0~45° |
| 湿度 | 20%~80% | |
| 其他 | 避免与易燃易爆或腐蚀性气体、液体接触,远离电子噪声源(等离子) | |
| 示教器线缆长度 | 8米 | |
| 本体-柜体连接线长度 | 6米 | |
| I/O参数 | 数字量:32位输入(NPN),31位输出(NPN); | |
| 本体预留信号线 | 12位(航空插头接线方式:焊接) | |
| 预留气路 | 无 | |
| 电源容量 | 4.5kVA | |
| 额定功率 | 3.5kW | |
| 额定电压 | 3相AC380V 50HZ | |
| 额定电流 | 6.7A | |
| 本体防护等级 | IP54(小臂IP67) | |
| 安装方式 | 地面安装 | |
| 本体重量 | 215kg | |
| 控制柜防护等级 | IP54 | |
| 控制柜重量 | 56KG | |




PRODUCT RECOMMENDATION
HOT NEWS
售前热线:400-9655-321
重庆公司:400-6007-826

![[V1.6.10]华数机器人操作与编程说明书v0.2.2.zip](./db_picture/pro5/202012161102525900.jpg)












